Ⅰ. 서론
차량용 통신 기술은 전기ㆍ전자공학자협회(IEEE)에서 2006년에 소개된 WAVE(Wireless Access in Vehicular Environments) 통신 기술을 시작으로 지속적인 발전을 거듭하고 있습니다. 국내에서는 2000년 초반부터 차량용 근거리 통신 기술인 DSRC(Dedicated Short Range Communication)을 상용화하기 시작하여 현재 전체 등록 차량의 83% 이상이 보급되었습니다.
현재의 차량용 통신 기술은 IEEE와 3GPP에서 제안한 기술로 나눌 수 있습니다. IEEE 기반 기술은 WAVE 및 NGV(Next Generation V2X) 통신 기술을 기반으로 하며, 이동 환경에서도 무선통신이 가능하도록 물리계층을 수정하여 고속 이동에서도 효율적인 통신이 가능하게 합니다. 반면 3GPP 기술은 LTE(Long Term Evolution) 및 NR(New Radio) 기반의 C-V2X(Cellular Vehicle to Everything) 기술을 제안하여 대용량 전송과 지연시간 최소화를 통해 높은 신뢰성을 보장합니다.
차량용 통신 기술의 발전에 따라 다양한 서비스와 유즈케이스가 등장하고 있으며, 유럽에서는 Day-1/1.5/2 등으로 구분하여 상용화 서비스에 대한 로드맵을 제시하고 있습니다. Day-1 서비스는 WAVE 및 LTE-V2X(Rel.14) 기술을 활용하여 100ms 이내의 지연시간과 10Mbps 내외의 전송속도를 지원하는 다양한 안전 서비스를 제공합니다. Day-1.5 서비스는 LTE-V2X(Rel.15) 기반의 자율주행 및 안전운전 지원 서비스를 제안하며, Day-2 서비스는 5G-NR-V2X 통신 기술을 기반으로 한 커넥티드 자율주행 서비스를 제안합니다.
본 논문에서는 C-V2X Release 15 및 Release 16을 활용한 커넥티드 서비스를 중심으로 표준단체에서 제시하는 대표적인 유즈케이스와 통신 요구사항을 설명합니다. 또한 현재의 차량용 통신 기술 동향을 살펴보고 결론을 도출합니다.
Ⅱ. 커넥티드 서비스를 위한 유즈케이스 및 요구사항
본 장에서는 차량용 통신 기술을 활용한 커넥티드 서비스에 관한 유즈케이스 및 서비스 요구사항을 다루고 있습니다. 이를 위해 대표적인 단체인 3GPP, 5GAA, 5GCAR의 문서를 참고하여 설명합니다.
먼저, 5GNR-V2X 통신 기술을 활용한 군집주행, 원격제어, 센서 공유, 첨단주행과 같은 4가지 대표적인 유즈케이스에 대한 서비스 요구사항을 살펴봅니다. 군집주행의 경우에는 차량 간 혹은 차량과 인프라 간의 통신을 통해 군집합류, 이탈, 제어 등의 메시지를 공유합니다. 원격제어의 경우에는 차량의 정보를 서버로 전송하고 원격 오퍼레이터가 적절한 제어 정보를 차량에게 전달합니다. 센서 공유 서비스는 객체 및 이벤트 정보를 주변 차량에 공유하여 차량의 인지 범위를 확대하고 인식 정확도를 개선합니다. 첨단주행 서비스는 차량이 인지한 정보를 실시간으로 주변 차량 또는 인프라에게 전달하여 안전성을 향상시킵니다.
이러한 각 유즈케이스들에 대한 서비스 요구사항은 각각의 표로 정리되어 있습니다. 군집주행, 원격제어, 센서 공유, 첨단주행 관련 유즈케이스와 그에 따른 서비스 요구사항을 [표 1], [표 2], [표 3], [표 4]에서 확인할 수 있습니다.



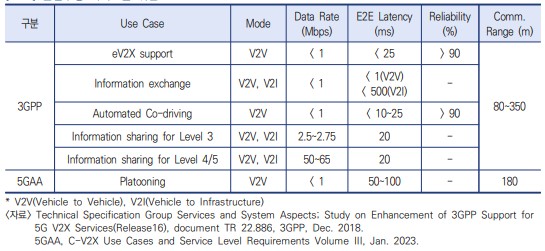
또한, 커넥티드 차량을 위한 원격 안전 관리, 편의 정보 제공, 차량 흐름 효율성 개선 등 다양한 유즈케이스들이 제시되고 있습니다. 이러한 유즈케이스들은 5GAA에서 제시되었으며, [표 5]에서 간략하게 정리되어 설명되고 있습니다. 이러한 유즈케이스들은 차량과 인프라 간 협력을 통해 보다 안전하고 효율적인 교통 환경을 조성하는 데 기여할 것으로 예상됩니다.

Ⅲ. 커넥티드 서비스 기술 개발 동향
C-V2X 기술을 활용하여 자율주행차량 및 일반 차량 간 협력을 통한 커넥티드 서비스에 대해 다루고 있습니다. 이러한 서비스들은 단순한 안전 메시지를 넘어서 자율주행과 교통 효율성을 개선하는 데 주력하고 있습니다.
먼저, 국내에서는 화물차 군집주행 연구와 기술 시연이 진행되었습니다. 한국도로공사, 국민대, 현대자동차 등의 기관이 참여하여 V2X 기반의 군집주행 운영기술을 개발하고 시연을 성공적으로 진행하였습니다. 이를 통해 군집주행 차량 제어 기술, 모바일 앱 기반의 운영 서비스 기술 등 다양한 연구 성과를 얻었습니다.


또한, 5GCAR 협회에서는 UTAC Teqmo 시험장에서 C-V2X 기술을 활용하여 차량 간 또는 차량과 인프라 간의 협력 주행 서비스를 시연하였습니다. 이 시연에서는 sensor sharing과 see through 서비스를 시연하고, 이를 통해 VRU 보호 서비스와 우합류 서비스를 검증하였습니다. 이러한 서비스들은 실제 교통 상황에서의 효율성과 KPI를 통해 성능을 확인하였습니다.







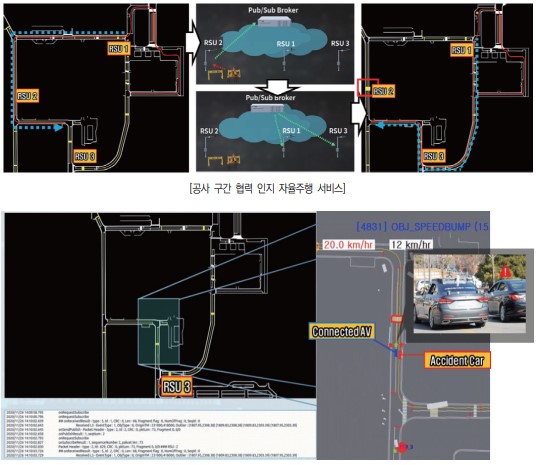
또한, 인프라와 자율주행차량 간의 협력 인지를 통한 자율주행 서비스 연구 및 시연이 ETRI 연구소에서 수행되었습니다. RSU가 주행 도로에 설치되어 있고, 이를 통해 주행 경로를 변경하거나 사고 차량 정보를 미리 전달하는 등의 협력이 이루어졌습니다.
마지막으로, 차량 간 V2V 통신을 활용한 협력 주행 서비스가 미국자동차공학회에서 정의되어 시연되었습니다. 이 시연에서는 무신호 교차로에서의 협력 주행과 긴급 차량에 대한 양보 요청, 또는 저속 주행 차량의 추월을 위한 협력 주행 등이 시연되었습니다.
이러한 다양한 사례들을 통해 C-V2X 기술을 활용한 협력형 자율주행 서비스의 발전 동향과 가능성을 확인할 수 있습니다.




Ⅳ. 결론
차량용 통신 기술은 지속적인 진화를 거듭하여 자율주행차량 및 연결형 서비스에 중요한 역할을 하고 있습니다. WAVE(Wireless Access in Vehicular Environments) 기술의 등장 이후, C-V2X(Connected Vehicle-to-Everything) 기술을 중심으로 다양한 서비스가 발전해 왔습니다. 이에 따라 고신뢰성, 낮은 지연 시간, 대용량 데이터 전송 등의 네트워크 요구사항이 높아지고 있습니다.
특히, C-V2X 기술은 군집주행, 원격제어, 센서 공유 및 첨단주행 등의 서비스 분야에서 활용되고 있습니다. 국내외에서는 이러한 기술을 활용하여 자율주행차량 및 연결형 서비스를 개발하고 있으며, 이를 통해 안전하고 효율적인 주행환경을 조성하고자 노력하고 있습니다.
특히, 최근에는 5G-NR-V2X 기술을 활용한 통신장치 및 서비스의 성능 검증이 진행되고 있어서, 향후 자율주행 서비스의 발전에 큰 기여가 될 것으로 기대됩니다. 또한, 차량용 통신 기술은 차량의 다른 센서와 융합하여 주행환경을 인식하고 공유하는 데 중요한 역할을 하고 있으며, 이는 향후 더욱 발전하여 차량 및 사물, 사람 간의 소통을 위한 기술로 진화할 것으로 예상됩니다
본 내용의 출처는 IITP 정보통신기획평가원의 주간기술동향 2126호 자료를 참고해서 작성했습니다.
공감과 댓글은 아이티신비에게 큰 힘이 됩니다.
블로그 글이 유용하다면 블로그를 구독해주세요.♥
'ICT 동향' 카테고리의 다른 글
| 거대 인공신경망 학습, 추론을 위한 지능형 반도체 기반 소프트웨어 플랫폼 기술동향 (24) | 2024.03.19 |
|---|---|
| 8K UHDTV 필드테스트로 보는글로벌 지상파방송 기술 동향 (19) | 2024.03.19 |
| 온디바이스 AI 생태계 구축 가속화 (0) | 2024.01.26 |
| 메타버스(Metaverse) 보안 (0) | 2024.01.26 |
| 2024년 ICT 10대 이슈 (0) | 2024.01.26 |